自由な発想、新しい視点で研究を行う TSUJI Lab.
福岡大学 工学部 電気工学科 電気機器応用研究室辻研究室
ロボットの触覚センサTACTILE SENSOR FOR ROBOTS
近年、人と同じ場所で作業する協働ロボットへの関心が高まっています。協働ロボットが対象と接触し、安全に作業するために触覚センサが重要な役割を果たします。また、対象が人や壊れやすいモノの場合、安全確保のためには近接(非接触)にて対象を事前に検知する機能が要求されます。そこで、本研究室では、ロボットの皮膚に応用可能な触覚センサ、近接覚センサ、近接覚センサと触覚センサを融合した近接覚・触覚センサの研究を行っています。最近の代表的な研究を、下記で紹介します。
S. Tsuji et al., Proximity Skin Sensor using Time-of-Flight Sensor for Human Collaborative Robot, IEEE Sensors Journal, Vol. 19, No. 14, pp. 5859-5864, 2019年7月 など

S. Tsuji et al., Proximity and Tactile Sensor Using Self-Capacitance Measurement for Human Collaboration Robots, IEEJ Transactions on Sensors and Micromachines, Vol. 138, No.1, pp. 2-8, 2018年1月
S. Tsuji et al., Self-Capacitance Proximity and Tactile Skin Sensor with Shock-Absorbing Structure for a Collaborative Robot, IEEE Sensors Journal, Vol. 20, No. 24, pp. 15075-15084, 2020年12月 など
S. Tsuji et al., P Sensor Module Combining Time-of-Flight with Self-Capacitance Proximity and Tactile Sensors for Robot, IEEE Sensors Journal, 2022年 など
S. Tsuji et al., A General-Purpose Safety Light Curtain Using ToF Sensor for End Effector on Human Collaborative Robot, IEEJ Transactions on Electrical and Electronic Engineering, Vol. 15, No. 12, pp.1868-1874, 2020年12月 など
デモ動画は、box(FU_box)を利用しています。
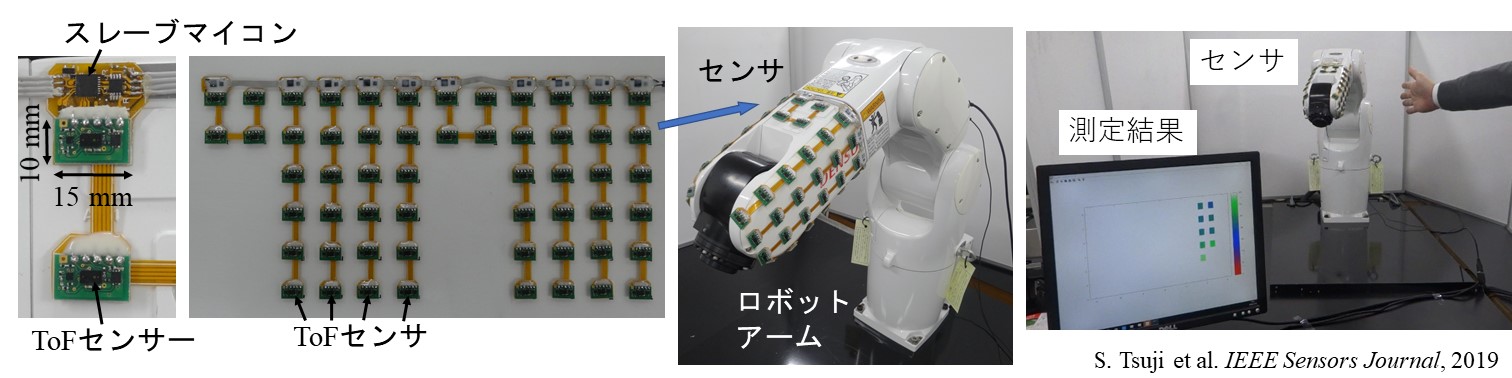
ToFセンサを用いた近接覚センサ
協働ロボットの皮膚として、ToF(Time of Flight)センサを用いた近接覚皮膚センサを提案しました。ToFセンサは、光の反射時間を計測することで、対象までの距離が検出可能なセンサです。多数のToF センサでロボット表面を覆い、ロボット周囲の状態をリアルタイムに取得することを目的にしています。本近接覚センサにより、ロボットに接触する前に物体の位置と物体のおおよその形状を検出でき、その情報をもとにロボットアームが制御可能であることを示しました。本近接覚センサにより、ロボットが人間を含む物体との不必要な接触を回避できると考えています。S. Tsuji et al., Proximity Skin Sensor using Time-of-Flight Sensor for Human Collaborative Robot, IEEE Sensors Journal, Vol. 19, No. 14, pp. 5859-5864, 2019年7月 など
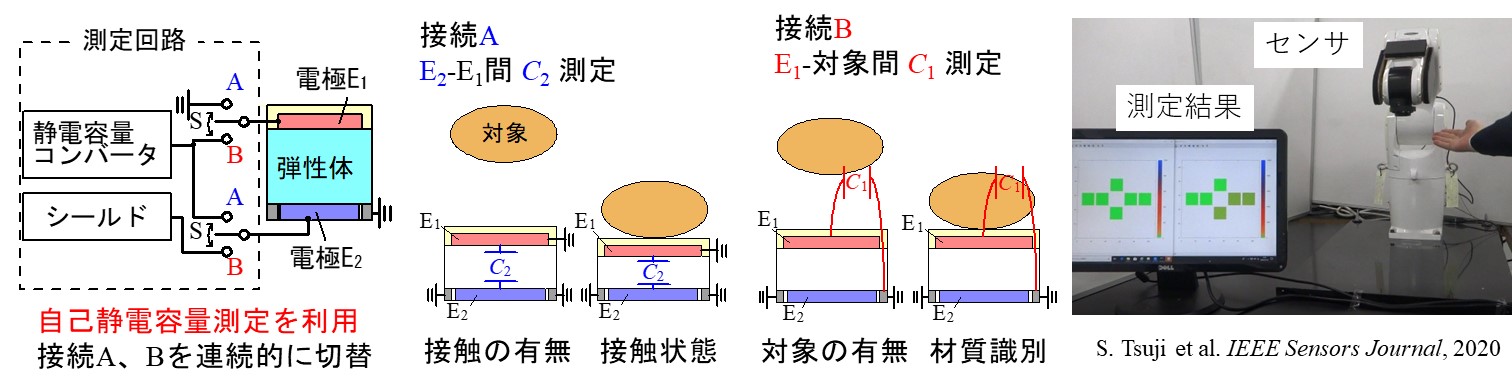
自己容量近接覚・触覚センサ
協働ロボットの皮膚として、自己容量近接覚・触覚センサを提案しました。自己容量測定は、単電極と接地間の静電容量を測定するものです。自己容量近接覚・触覚センサは、弾性体を電極で挟んだ単純な構造で、測定電極を切り替え測定することで、非接触から接触までシームレスに測定可能です。試作したセンサをロボットアーム表面に実装し、得した情報をもとにロボットアームが制御可能であることを示しました。更に、センサ自体に衝撃吸収機能を持たせ、万一対象と衝突した場合においても、衝突による衝撃を緩和できることを提案しました。この近接覚・触覚センサは、ロボットなどの対象に合わせた形に簡単に変えることができ、曲面などにも貼り付けることが可能であることから、ロボット表面全体をセンサで覆うこともできると考えられます。S. Tsuji et al., Proximity and Tactile Sensor Using Self-Capacitance Measurement for Human Collaboration Robots, IEEJ Transactions on Sensors and Micromachines, Vol. 138, No.1, pp. 2-8, 2018年1月
S. Tsuji et al., Self-Capacitance Proximity and Tactile Skin Sensor with Shock-Absorbing Structure for a Collaborative Robot, IEEE Sensors Journal, Vol. 20, No. 24, pp. 15075-15084, 2020年12月 など
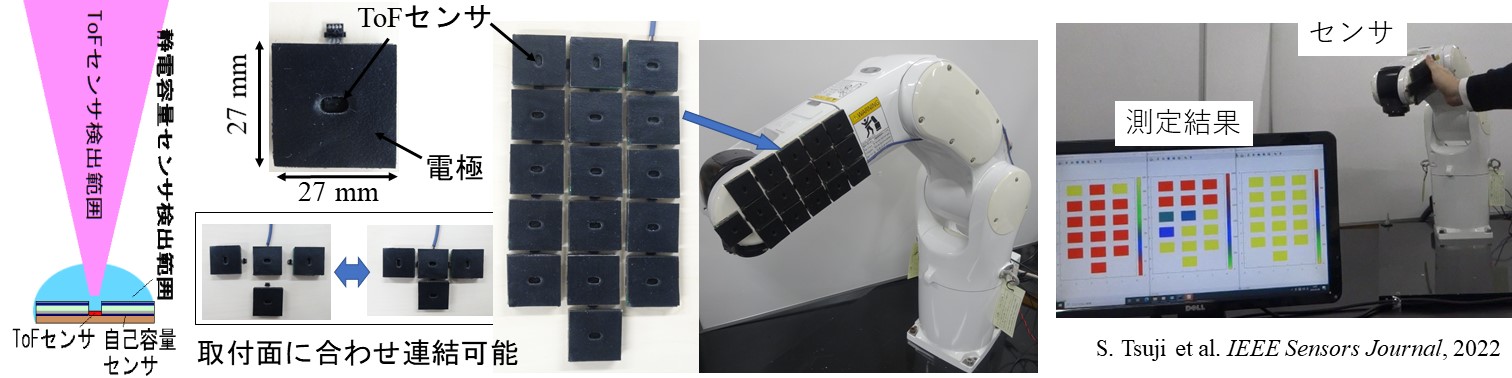
ToF・自己容量近接覚・触覚センサ
協働ロボットの皮膚として、ToFセンサと上記自己容量近接覚・触覚センサを組み合わせたToF・自己容量近接覚・触覚センサを提案しました。ToFセンサは、距離検出が可能で、Z軸方向の検出範囲が広いが、近距離における検出精度やX-Y方向の検出範囲が狭いという課題があります。一方、上記自己容量近接覚・接触センサは、近距離の検出感度が高く、接触状態を測定できるが、距離検出が難しく、Z軸の検出距離が短い課題があります。そこで、ToFセンサと自己容量近接覚・接触センサを組み合わせることによって、広範囲、高感度で近接測定が可能なシステムを提案しました。異なる原理の組み合わせによる測定により、信頼度の向上も期待できます。センサをモジュール化し、ロボット表面の実装面に合わせセンサ数を容易に増減できます。試作した16個のセンサモジュールをロボットアーム表面に実装し,近接における対象までの距離及び接触状態がシームレスに測定可能であることを示しました。更に取得したデータをもとにロボットをリアルタイムに制御可能なことを示しました。それにより,本センサが協働ロボットの安全対策として有用であると考えています。S. Tsuji et al., P Sensor Module Combining Time-of-Flight with Self-Capacitance Proximity and Tactile Sensors for Robot, IEEE Sensors Journal, 2022年 など
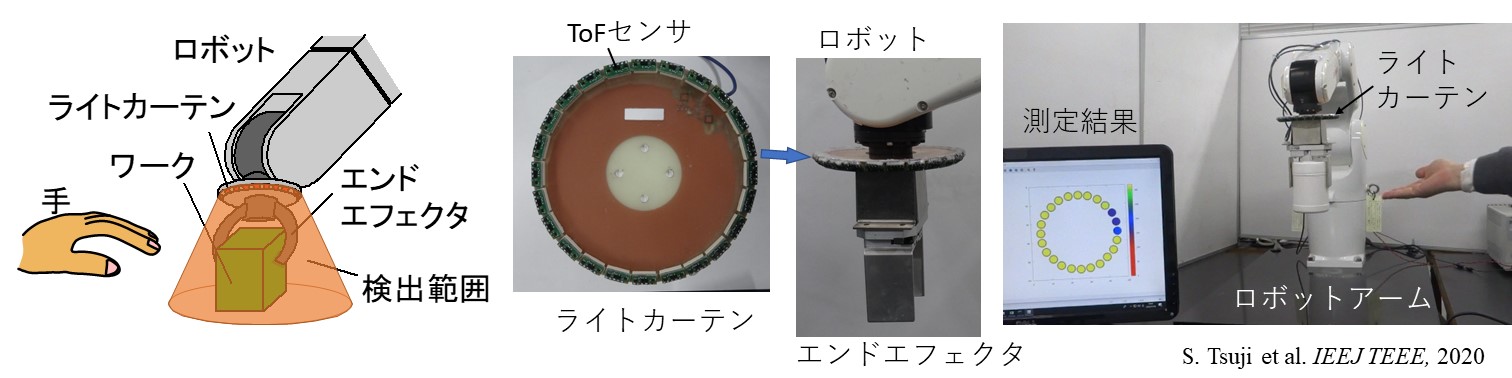
ToFセンサを用いたエンドエンドエフェクタ用セーフティライトカーテン
協動ロボットのエンドエフェクタ及びワークの安全対策のためにToF センサを用いたライトカーテンを提案しました。本ライトカーテンはエンドエフェクタの上部に設置され、エンドエフェクタごとにセンサを設計する必要がなく、さまざまなエンドエフェクタに利用できます。試作したライトカーテンをロボットアームに実装し、エンドエフェクタ及びワーク周囲の物体を非接触で検出できることを示しました。また、ライトカーテンで測定したデータによりロボットアームを制御し、予期せぬ衝突を回避できることを示しました。これらのことより、提案したライトカーテンは、協働ロボットのエンドエフェクタの安全対策として有用であると考えています。S. Tsuji et al., A General-Purpose Safety Light Curtain Using ToF Sensor for End Effector on Human Collaborative Robot, IEEJ Transactions on Electrical and Electronic Engineering, Vol. 15, No. 12, pp.1868-1874, 2020年12月 など
デモ動画は、box(FU_box)を利用しています。
辻研究室
〒814-0180
福岡市城南区七隈8-19-1
福岡大学工学部電気工学科
TEL 092-871-6631(代表)